การประมาณค่าอัตราเฉือนที่มีประสิทธิผลของเครื่องวัดความหนืดในกระบวนการอินไลน์ SRV และเครื่องวัดความหนาแน่น SRD
Rheonics เซ็นเซอร์ Type-SR เป็นเครื่องมืออินไลน์สำหรับวัดความหนืดและความหนาแน่นของของเหลวแบบเรียลไทม์ รวมถึงอุณหภูมิและอนุพันธ์จากค่าเหล่านี้ Rheonics มีเครื่องวัดความหนืดในกระบวนการ SRV เพื่อวัดความหนืด และเครื่องวัดความหนาแน่นแบบอินไลน์ SRD สำหรับค่าความหนาแน่นและความหนืดของของเหลว หัวเซนเซอร์ทั้งสองมีขนาดกะทัดรัด น้ำหนักเบา และปิดผนึกอย่างแน่นหนา ทำให้เหมาะสำหรับกระบวนการทางอุตสาหกรรมทั้งหมดที่เกี่ยวข้องกับของเหลว
เซ็นเซอร์ทั้ง SRV และ SRD ใช้เทคโนโลยีเครื่องสะท้อนแรงบิดแบบสมดุล (BTR) เซ็นเซอร์ทั้งสองจะวัดและวัดความหนืดของของเหลวที่สัมผัสกัน สำหรับของเหลวของนิวตัน คุณจะได้ความหนืดเท่ากันโดยไม่คำนึงถึงเครื่องมือที่ใช้ อย่างไรก็ตาม สำหรับของไหลที่ไม่ใช่แบบนิวตัน นั่นไม่ใช่กรณีดังกล่าว และอุปกรณ์ต่างๆ ก็วัดค่าความหนืดที่แตกต่างกัน ซึ่งมักจะไม่ได้เกิดจากความไม่ถูกต้องของตัวเครื่องมือเอง แต่เนื่องจากการขึ้นต่อกันของแรงเฉือนของความหนืด และความจริงที่ว่าเครื่องมือต่างๆ ทำการวัดที่ต่างกัน อัตราเฉือน
เนื่องจากการขึ้นต่อกันของความหนืดของแรงเฉือนสำหรับของไหลที่ไม่ใช่ของนิวตัน และเพื่อให้สามารถเปรียบเทียบระหว่างเครื่องวัดความหนืดที่แตกต่างกันได้ (บ่อยครั้งระหว่างเครื่องวัดความหนืดของกระบวนการ เช่น SRV และอุปกรณ์ในห้องปฏิบัติการ เช่น เครื่องวัดความหนืดแบบหมุนหรือรีโอมิเตอร์) เราต้องการทำความเข้าใจอัตราเฉือนที่มีประสิทธิภาพที่ SRV หรือ SRD กำลังทำการวัด การวิเคราะห์ด้านล่างกล่าวถึง SRV แต่ใช้ได้กับ SRD อย่างเท่าเทียมกัน
1. เครื่องวัดความหนืด SRV หรือเครื่องวัดความหนาแน่น SRD ทำงานอย่างไร
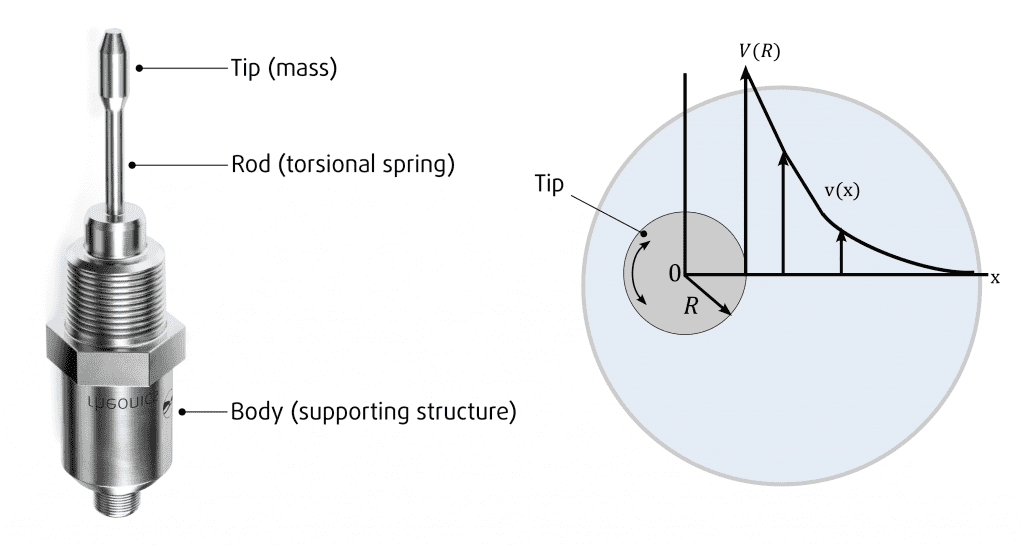
องค์ประกอบการตรวจจับของเซ็นเซอร์ SRV ประกอบด้วยแท่งและมวลที่ติดอยู่ที่ปลาย แท่งนี้และส่วนปลายมีลักษณะเป็นวงกลมและเป็นทรงกระบอก ปลายอีกด้านเชื่อมต่อกับตัวเครื่องซึ่งมีทรานสดิวเซอร์สำหรับการกระตุ้นและการรับรู้
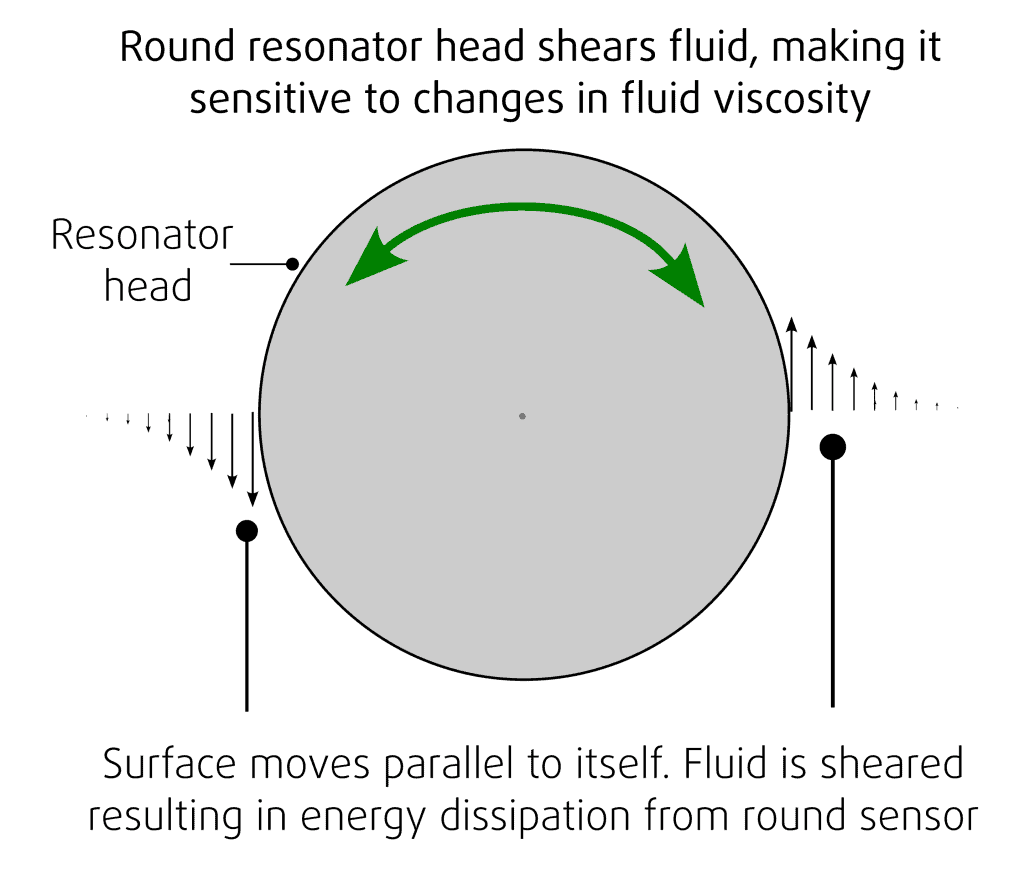
เซ็นเซอร์สั่นสะเทือนในรูปแบบแรงบิด ส่วนเรโซเนเตอร์แบบบิดมีความเสถียรมากกว่า และแยกออกจากสภาพแวดล้อมทางกลได้ดีกว่า เครื่องสะท้อนเสียงแบบบิดที่เป็นทรงกระบอกจะสั่นขนานกับพื้นผิวของมันเอง พวกมันได้รับอิทธิพลจากแรงเฉือนและดังนั้นจึงมีความไวต่อแรงกระจาย (การหน่วงแบบหนืด) เป็นหลัก มากกว่าผลกระทบจากการรับน้ำหนัก (หรือมักเรียกว่าการหน่วงแรงเฉื่อย)
2. เหตุใดอัตราเฉือนจึงเกี่ยวข้องกับเครื่องวัดความหนืดของกระบวนการ
ความหนืดของของไหลที่ไม่ใช่ของนิวตันสามารถเปลี่ยนแปลงได้ขึ้นอยู่กับอัตราการเฉือนของของเหลวนั้น ซึ่งหมายความว่าค่าความหนืดเดียวไม่สามารถเชื่อมโยงกับของเหลวชนิดนี้ได้ในทุกสถานะ (เช่น คงที่ ไหลด้วยความเร็วที่แตกต่างกัน)
เครื่องวัดความหนืดในห้องปฏิบัติการมักจะอนุญาตให้ผู้ใช้เปลี่ยนอัตราเฉือนหรือความเร็วในการหมุนที่จะวัดความหนืด Rheonics SRV และ SRD มีอัตราการเฉือนซึ่งมักจะสูงกว่าอัตราเฉือนสำหรับเครื่องมือในห้องปฏิบัติการอย่างมาก และผู้ใช้ไม่สามารถเปลี่ยนแปลงได้
เป็นไปได้ที่จะมีแนวคิดเชิงคุณภาพเกี่ยวกับช่วงแรงเฉือนที่คาดหวังสำหรับเซ็นเซอร์ความหนืด SRV และการคำนวณจะแสดงอยู่ในบทความนี้ ซึ่งจะช่วยให้มีคุณสมบัติ (และในขอบเขตหนึ่งของการวัดปริมาณ) ที่จะวัดความหนืด และเชื่อมโยงการอ่านค่ากับเครื่องมืออื่นๆ
อย่างไรก็ตาม ความสัมพันธ์ที่แท้จริงระหว่างแรงเฉือนของการวัดความหนืด Type-SR กับเครื่องมือในห้องปฏิบัติการอื่นๆ ส่วนใหญ่เป็นเชิงประจักษ์และอาจไม่ตรงตามการประมาณค่าเชิงคุณภาพ อัตราเฉือนโดยประมาณอาจไม่ตรงกับค่าความหนืดจากรีโอมิเตอร์ทุกประการ พิจารณาว่า Rheonics เซ็นเซอร์เป็นอุปกรณ์ควบคุมกระบวนการที่เป็นมากกว่าเซ็นเซอร์วัดความหนืด โดยเน้นที่ความสามารถในการทำซ้ำที่สูงมาก และความสามารถในการทำซ้ำของการวัดด้วยความละเอียดที่ไม่มีใครเทียบได้ (มักจะสูงกว่าเครื่องมือในห้องปฏิบัติการถึง 10-100 เท่า)
3. การประมาณค่า Shear Rate ของเครื่องวัดความหนืดกระบวนการสั่น
มีพารามิเตอร์สองตัวที่สำคัญที่สุดสำหรับการประมาณค่าแรงเฉือน ได้แก่ ความกว้างของความเร็วและความหนาของชั้นขอบเขต จำเป็นต้องคำนวณพารามิเตอร์ต่อไปนี้
แรงเฉือนได้รับจาก:

สมการที่ 1: แรงเฉือน
สำหรับของไหลแบบนิวตัน η คือคุณลักษณะคงที่ของวัสดุของของไหล ∂v/∂x คืออัตราเฉือนในของไหล โดยการใช้สมการเนเวียร์-สโตกส์ การแก้ปัญหาภายใต้สภาวะแกนเดียวเป็นคาบ คำตอบสำหรับแอมพลิจูดของความเร็วคือ:

สมการที่ 2: ความกว้างของความเร็ว
สำหรับของไหลแบบนิวตัน η คือคุณลักษณะคงที่ของวัสดุของของไหล ∂v/∂x คืออัตราเฉือนในของไหล โดยการใช้สมการเนเวียร์-สโตกส์ การแก้ปัญหาภายใต้สภาวะแกนเดียวเป็นคาบ คำตอบสำหรับแอมพลิจูดของความเร็วคือ:
- x: ระยะห่างจากผนังเซ็นเซอร์
- V: แอมพลิจูดของความเร็วที่พื้นผิวเซ็นเซอร์ R คือรัศมีของส่วนปลาย
- δ: คือความหนาของชั้นขอบ
- i: คือรากที่สองของ -1
พื้นที่ ความหนาของชั้นขอบเขต สามารถพบได้ด้วยสมการ:

สมการที่ 2: ความหนาของชั้นขอบเขต
- η: ความหนืดแบบไดนามิก
- ω: ความถี่เชิงมุม
- ρ: ความหนาแน่นของของไหล
โดยพิจารณาว่า ณ x=2δ ความเร็วจะลดลงเหลือ 13 % ของค่าที่พื้นผิวเซ็นเซอร์ อัตราแรงเฉือน γ=∂v(0)/∂x ที่พื้นผิวของเซนเซอร์ (x=0) ดังนี้:

สมการที่ 4: อัตราเฉือน
โดยที่แอมพลิจูดของความเร็ว V(R) (5) ถูกกำหนดโดย:

สมการที่ 5: ความกว้างของความเร็ว
- R: ระยะห่างจากแกนสั่นสะเทือนถึงพื้นผิวเซ็นเซอร์
- φ: แอมพลิจูดการสั่นสะเทือนเชิงมุม
ส่วนปลายจาก SRV จะทำการสั่นสะเทือนแบบหมุนแบบไซน์ φ เกี่ยวกับแกนสมมาตรของมัน

สมการที่ 5: การสั่นสะเทือนแบบหมุนแบบไซนูซอยด์
สำหรับ SRV ความเร็ว V(R) อยู่ที่ประมาณ 50 มม./วินาที และความถี่คือ 7500 Hz → ω=2π x 7500
พารามิเตอร์ วี(R) เป็นอิสระจากความหนืด แต่เป็นความหนาของชั้นขอบเขตของของไหล δ เพิ่มขึ้น กราฟต่อไปนี้แสดงพฤติกรรมของอัตราการเฉือนเทียบกับความหนืด และแสดงความแปรผันของอัตราการเฉือนทั้งในด้านความหนืดและความหนาแน่นของของไหลที่อยู่ระหว่างการตรวจสอบ

การประยุกต์การประมาณอัตราเฉือนของเครื่องวัดความหนืดกระบวนการในกระบวนการทางอุตสาหกรรม
อัตราเฉือนที่มีประสิทธิผลของเครื่องวัดความหนืดแบบสั่นคืออัตราเฉือนที่ของไหลประสบระหว่างการวัด สิ่งสำคัญคือต้องประมาณอัตราเฉือนที่มีประสิทธิผลของวิสโคมิเตอร์แบบสั่นเพื่อเปรียบเทียบผลลัพธ์ที่ได้จากเครื่องวัดความหนืดต่างๆ และเพื่อออกแบบกระบวนการทางอุตสาหกรรมที่เกี่ยวข้องกับของไหลที่ไม่ใช่ของนิวตัน
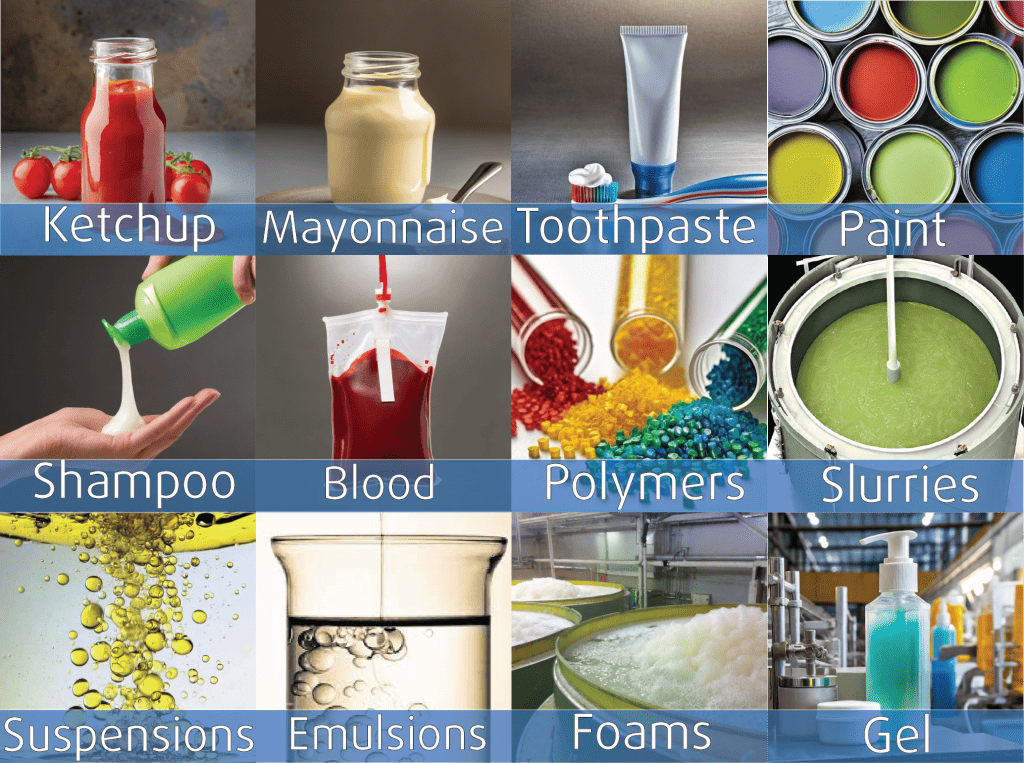
เครื่องวัดความหนืดกระบวนการสั่นสะเทือน เช่น SRV และ SRD ถูกนำมาใช้กันอย่างแพร่หลายในการวัดความหนืดแบบเรียลไทม์แบบอินไลน์ของของไหลที่ไม่ใช่แบบนิวตันในอุตสาหกรรมต่างๆ รวมถึงการแปรรูปอาหาร เครื่องสำอาง และยา
ตัวอย่างของของไหลที่ไม่ใช่ของนิวตันซึ่งโดยทั่วไปจะวัดโดยใช้เครื่องวัดความหนืดของกระบวนการสั่นสะเทือนจะแสดงอยู่ทางด้านซ้าย
เทคโนโลยีเซนเซอร์ หลักการทำงานและการใช้งาน
viscometers
เครื่องวัดความหนาแน่น